Overall System Block Diagram
- Feb 5, 2017
- 1 min read
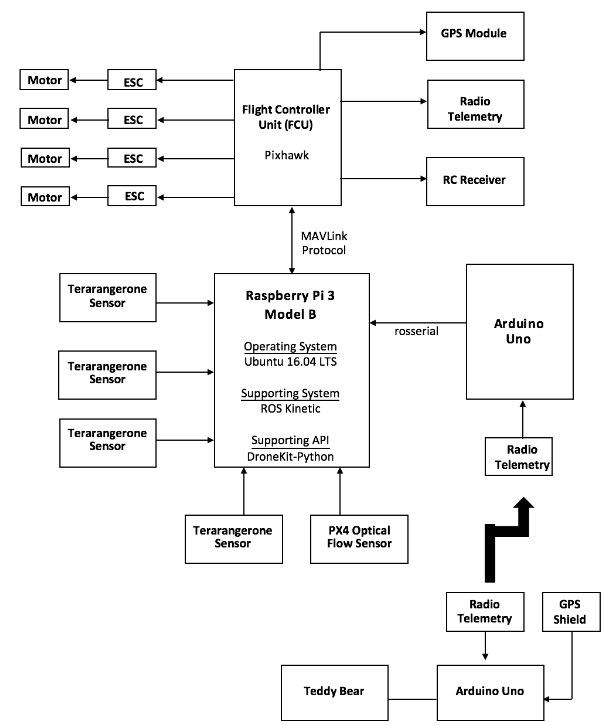
The main operating system used is Ubuntu 16.04 Long Term Support (LTS) running ROS Kinetic. The main control of the drone is done with the use of DroneKit-Python API.
Raspberry Pi and Pixhawk is communicating other via MAVLink. The programming is also done heavily by sending MAVLink messages to manipulate the MAVLink parameters to control the drones be it direction of movements, velocities, arming, and so forth.

As shown in the picture above, the connection from pixhawk and raspberry pi is done through the use of MAVLink protocol. The team make use of the micro-USB port from the pixhawk to connect to the raspberry pi.
As the team progresses, we have decided to take a leap of faith and implement ROS into our programming architecture to improve the functionality of the product. Subsequently, all of the interface that was done before the implementation of ROS is converted into ROS. This will be further elaborated in the coming section.







Comments